Nel web e in vari testi didattici con riferimento a terne di vettori si trovano spesso usati in modo confuso e talvolta errato i termini "destrorsa/sinistrorsa" e "levogira/destrogira" . Una tale confusione terminologica si riflette, attualmente, anche nei risultati forniti da alcune "intelligenze artificiali" evidentemente non ancora in grado di distinguere correttamente i relativi significati. In questa sezione cerchiamo di fare chiarezza analizzando i diversi significati di questi termini.
L'origine della confusione nasce principalmente perché non si ha ben chiaro cosa intendere con "destrorsa/sinistrorsa" e "levogira/destrogira", termini che vanno riferiti ad aspetti diversi spesso invece intesi erroneamente come sinonimi.
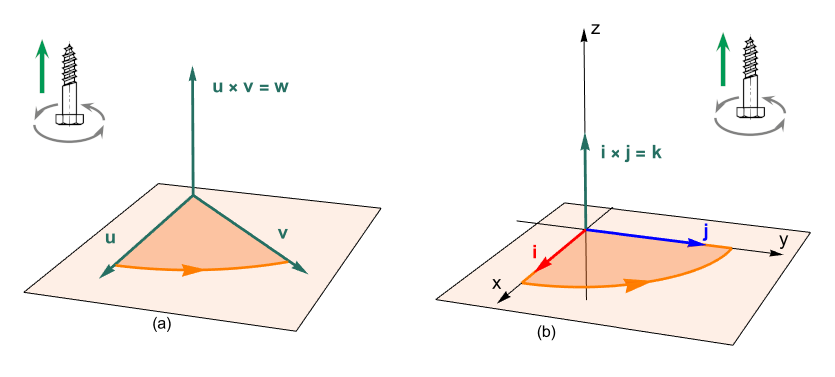
Innanzitutto una terna nello spazio tridimensionale euclideo è costituita da tre vettori linearmente indipendenti (per cui, nella terna, non compaiono vettori paralleli), generalmente applicati allo stesso punto, e indicati in questo lavoro in grassetto, per esempio \(\mathbf{u}\), \(\mathbf{v}\) e \(\mathbf{w}\). A ciascuno di questi è ovviamente associata una direzione e, se questi sono mutuamente perpendicolari e applicati ad un'origine comune, questi permettono di definire un sistema di tre assi cartesiani a ciascuno dei quali si assegnano, di norma, le lettere nell'ordine lessicografico \(x\), \(y\) e \(z\) e ai vettori le lettere corrispondenti \(\mathbf{i}\), \(\mathbf{j}\) e \(\mathbf{k}\) (e noi, in questo lavoro, associamo ad essi pure un colore, nell'ordine rosso, blu e verde, fig. 1.1 (b)).
Con riferimento ad entrambe le immagini di fig. 1.1, osserviamo che se ruotiamo il primo vettore \(\mathbf{u}\) della terna in modo da trasportarlo sul secondo vettore \(\mathbf{v}\) attraverso l'angolo di minor ampiezza e ruotiamo nello stesso verso una comune vite disposta perpendicolarmente al piano dei due vettori, questa avanza in un dato verso. Se il terzo vettore \(\mathbf{w}\), parallelo alla vite, qualsiasi sia il suo legame con i primi due, possiede verso concorde con l'avanzamento osservato, allora la terna si dice destrorsa.
In figura 1.1 (b) riportiamo, come esempio, una terna destrorsa di vettori ortogonali aventi modulo unitario e perciò detti versori. Questi rappresentano i vettori di base, o semplicemente la base, di un sistema cartesiano tridimensionale destrorso.
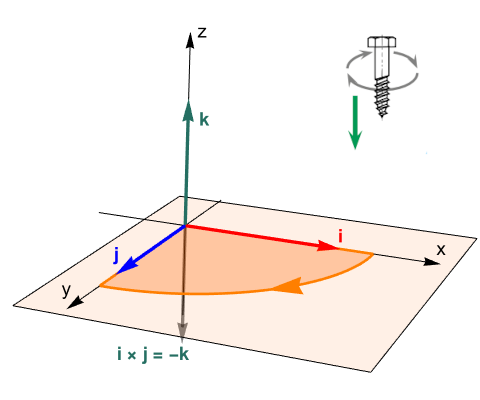
Viceversa se l'avanzamento della vite, ruotata nel verso che trasporta il primo vettore (\(\mathbf{i}\) nella figura 1.2) sul secondo \(\mathbf{j}\) per l'angolo di ampiezza minore, ha verso opposto a quello stabilito per il terzo, \(\mathbf{k}\), allora la terna si dice sinistrorsa. In figura 1.2 riportiamo, ancora come esempio, una terna sinistrorsa di versori ortogonali che costituiscono la base di un sistema cartesiano tridimensionale sinistrorso.
In matematica e in fisica si definisce sull'insieme dei vettori un prodotto vettoriale \(\mathbf{u}\times\mathbf{v}\) che associa ad ogni coppia di vettori \(\mathbf{u}\) e \(\mathbf{v}\) un terzo vettore \(\mathbf{w}\). Questo vettore è ortogonale al piano individuato da \(\mathbf{u}\) e \(\mathbf{v}\) quando applicati allo stesso punto, possiede il verso tale da costituire con i primi due una terna destrorsa e modulo dato dal prodotto \(|\mathbf{w}|=|\mathbf{u}|\cdot|\mathbf{v}|\sin\alpha\) con \(\alpha\) angolo tra i primi due vettori. Pertanto il prodotto vettoriale di fig. 1.1 (a) rappresenta una terna destrorsa
\[ \mathbf{u} \times \mathbf{v} = \mathbf{w} \]così come il prodotto vettoriale tra versori \(\mathbf{i} \times \mathbf{j} = \mathbf{k}\) di figura 1.1 (b). Nella terna sinistrorsa rappresentata in figura 1.2 risulta invece \(\mathbf{i} \times \mathbf{j} = -\mathbf{k}\).
Poiché i concetti di orario e antiorario dipendono dal punto di vista dell'osservatore mentre l'avanzamento di una comune vite ruotata concordemente nel verso che porta il primo sul secondo vettore (attraverso l'angolo di ampiezza minore) è, da questo, indipendente, l'uso dei termini orario/antiorario si deve sempre accompagnare alla dichiarazione del punto di vista. Pertanto
notiamo che la rotazione che porta il primo vettore sul secondo è:
I termini levogiro e destrogiro vanno quindi utilizzati solo in relazione ad un verso di rotazione che può essere, rispettivamente, antiorario o orario ma, come già detto, vanno accompagnati dalla dichiarazione del punto di vista scelto. Solo così si può giustificare l'uso di alcuni testi che considerano "levogira" come sinonimo di "destrorsa" mentre altri, creando ulteriore confusione e in modo erroneo, associano "levogira" per indicare una terna sinistrorsa.
I termini destrorso e sinistrorso trovano invece ragione d'essere nella seguente regola pratica. Associamo alle dita della mano destra, indice, medio e pollice rispettivamente, il primo vettore \(\mathbf{u}\) (oppure \(\mathbf{i}\) o l'asse \(x\)), il secondo vettore \(\mathbf{v}\) (oppure \(\mathbf{j}\) o l'asse \(y\)) e il terzo vettore \(\mathbf{w}\) (oppure \(\mathbf{k}\) o l'asse \(z\)). Le tre dita distese formano una terna destrorsa in quanto la rotazione dell'indice (\(\mathbf{u}\)) sul medio (\(\mathbf{v}\)) fa avanzare la vite nel verso del pollice (\(\mathbf{w}\)).
Analogamente le tre dita della mano sinistra con le stesse assegnazioni formano una terna sinistrorsa ma la vite ruotata nel verso che porta il primo (indice) sul secondo (medio) avanza nel verso opposto indicato dal pollice.
In definitiva, abbiamo queste due regole pratiche.
Per evitare confusioni in quanto segue preferiamo usare i termini non ambigui di terna "destrorsa" e "sinistrorsa" mentre escludiamo locuzioni dall'interpretazione incerta come terna "levogira" e terna "destrogira".
Per individuare grandezze per le quali non è sufficiente fornire un valore numerico ma, per essere specificate completamente, necessitano anche di una direzione e di un verso (un esempio: la posizione di un oggetto nel piano), nelle scienze matematiche e in particolare in Fisica, si utilizza il concetto di vettore che, sia nel piano che nello spazio, può essere geometricamente rappresentato da un segmento orientato.
Difatti, un vettore è un'entità matematica caratterizzata da
Definito in un piano un sistema cartesiano di origine \(O\) e composto da due assi ortogonali individuati dai vettori di base di modulo unitario (versori) \({\bf i}=(1,0)\), \({\bf j}=(0,1)\), un vettore può essere rappresentato come una freccia che parte dall'origine \(O\) e termina in un punto \(P\) di coordinate \(P(x,y)\). La direzione del vettore è quella della retta che congiunge \(O\) a \(P\), il verso è quello che va da \(O\) a \(P\) e il modulo è la distanza tra i due punti (fig. 1.3).

Il vettore \({\bf OP}\) è quindi rappresentato tramite i versori come
\[ {\bf OP} = x\, {\bf i} + y\, {\bf j}\tag{1.1}\label{eq:1.1} \]oppure più brevemente dalla coppia \((x,y)\), mentre il suo modulo è dato dalla
\[ |{\bf OP}| = \sqrt{x^2 + y^2}.\tag{1.2}\label{eq:1.2} \]Se \({\bf OP}\) rappresenta una direzione nello spazio e una distanza, appare evidente che queste grandezze non debbano dipendere dal sistema cartesiano scelto e pertanto il vettore dovrà essere indipendente dalla sua particolare rappresentazione. Il sistema cartesiano può quindi essere traslato o ruotato ma direzione, verso e modulo non dovranno cambiare mentre potranno variare le sue componenti cioè la sua rappresentazione nel particolare sistema scelto.
Poiché siamo interessati a come le componenti di una particolare rappresentazione variano a seguito di una rotazione degli assi cartesiani, definiamo un secondo sistema cartesiano avente la medesima origine \(O'\equiv O\) ma con gli assi \(x'\) e \(y'\) ruotati attorno ad \(O\) nel piano \(xy\) di un angolo \(\theta\) che supponiamo positivo (fig. 1.4). Indicate con apici le grandezze nel nuovo sistema, i versori di questo sono \({\bf i}'\) e \({\bf j}'\) e la loro espressione in termini dei versori iniziali \({\bf i}\) e \({\bf j}\) si ottiene facilmente con la goniometria elementare
\[ \cases{\eqalign{{\bf i}' &= \cos\theta\, {\bf i} + \sin\theta\, {\bf j}\cr {\bf j}' &= \cos(\theta+{90^\circ})\, {\bf i} + \sin(\theta+{90^\circ})\, {\bf j}\cr}} \]da cui
\[ \cases{\eqalign{{\bf i}' &= \cos\theta\, {\bf i} + \sin\theta\, {\bf j}\cr {\bf j}' &= -\sin\theta\, {\bf i} + \cos\theta\, {\bf j}.\cr}}\tag{1.3}\label{eq:1.3} \]
Sfruttando il prodotto matriciale, queste relazioni si possono condensare come
\[ \begin{pmatrix}{\bf i}' \cr {\bf j}'\end{pmatrix}=\begin{pmatrix} \cos\theta & \sin\theta \cr -\sin\theta & \cos\theta \end{pmatrix}\!\!\begin{pmatrix}{\bf i}\cr{\bf j}\end{pmatrix}\!. \]Il vettore \({\bf OP}\) nel nuovo sistema ruotato è descritto come
\[ {\bf OP} = x'\, {\bf i}' + y'\, {\bf j}'\tag{1.4}\label{eq:1.4} \]dove \(x'\) e \(y'\) sono le sue nuove componenti. Sostituendo la precedente \eqref{eq:1.3} in quest'ultima ne discende
\[ {\bf OP} = x'\, (\cos\theta\, {\bf i} + \sin\theta\, {\bf j}) + y'\, (-\sin\theta\, {\bf i} + \cos\theta\, {\bf j}) \]e quindi con semplici passaggi
\[ {\bf OP} = (x'\cos\theta - y'\sin\theta)\, {\bf i} + (x'\sin\theta + y'\cos\theta)\, {\bf j}. \]Confrontando questa espressione con la \eqref{eq:1.1} otteniamo il sistema di equazioni
\[ \cases{\eqalign{x &= x'\cos\theta - y'\sin\theta\cr y &= x'\sin\theta + y'\cos\theta\cr} }\tag{1.5}\label{eq:1.5} \]che può essere risolto nelle incognite \(x'\) e \(y'\) come
\[ \cases{\eqalign{x' &= x\cos\theta + y\sin\theta\cr y' &= -x\sin\theta + y\cos\theta.\cr}} \tag{1.6}\label{eq:1.6} \]Le componenti del vettore \({\bf OP}\) nel sistema ruotato sono quindi date dalle \eqref{eq:1.6} che esprimiamo in termini di matrice come
\[ \begin{pmatrix}{x}' \cr {y}'\end{pmatrix}=\begin{pmatrix} \cos\theta & \sin\theta \\ -\sin\theta & \cos\theta \end{pmatrix}\!\!\begin{pmatrix}{x}\cr{y}\end{pmatrix}.\tag{1.7}\label{eq:1.7} \]Se ora, da un sistema bidimensionale passiamo ad uno spazio tridimensionale possiamo interpretare la rotazione appena eseguita come una rotazione attorno all'asse \(z\) di un sistema tridimensionale avente come assi cartesiani le rette definite dai tre versori mutuamente perpendicolari \({\bf i}, {\bf j},{\bf k}\) e costituenti una terna destrorsa in quanto sussiste tra loro il prodotto vettoriale \({\bf i}\times{\bf j}={\bf k}\). Il sistema ruotato è pure definito da una terna destrorsa di versori ortogonali \({\bf i}', {\bf j}',{\bf k}'\) (fig. 1.5).

La rotazione precedente si configura quindi come una rotazione antioraria di angolo \(\theta\) del piano \(xy\) attorno all'origine \(O\) e avente per asse il versore \({\bf k}\). Poiché in tal caso la coordinata \(z\) del vettore \({\bf OP}\) non varia in quanto \({\bf k}={\bf k'}\), la terna di equazioni è ora
\[ \cases{\eqalign{x' &= x\cos\theta + y\sin\theta\cr y' &= -x\sin\theta + y\cos\theta.\cr z'&=z\cr}}\tag{1.8}\label{eq:1.8} \]e la sua espressione matriciale diventa
\[ \hbox{rotazione attorno a }z\qquad \bbox[border:1px solid red,15px,#ffffcc]{ \begin{pmatrix}{x}' \cr {y}'\cr z'\end{pmatrix}=\begin{pmatrix} \cos\theta & \sin\theta& 0 \cr -\sin\theta & \cos\theta& 0\cr 0 & 0 & 1\cr \end{pmatrix}\!\!\begin{pmatrix}{x}\cr{y}\cr z\end{pmatrix}\!.}\tag{1.9}\label{eq:1.9} \]Queste osservazioni si possono generalizzare a rotazioni attorno ad uno qualunque dei versori di base. Pertanto una rotazione di angolo \(\theta\) del piano \(xz\) con asse \({\bf j}\) è descritta dalle relazioni
\[ \cases{\eqalign{x' &= x\cos\theta - z\sin\theta\cr y'&=y\cr z' &= x\sin\theta + z\cos\theta,\cr }} \](per rispettare il carattere destrorso della terna sostituire nella figura 1.4, \({\bf i}\) con \({\bf k}\) e \({\bf j}\) con \({\bf i}\)), mentre la rotazione di asse \({\bf i}\) del piano \(yz\) risulta (sostituzioni in fig. 1.4, \({\bf i} \rightarrow {\bf j}\) e \({\bf j} \rightarrow {\bf k}\))
\[ \cases{\eqalign{ x'&=x\cr y' &= y\cos\theta + z\sin\theta\cr z' &= -y\sin\theta + z\cos\theta.\cr }} \]Le stesse in forma matriciale diventano
\[ \hbox{rotazione attorno a }y\qquad \bbox[border:1px solid red,15px,#ffffcc]{ \begin{pmatrix}{x}' \cr {y}'\cr z'\end{pmatrix}=\begin{pmatrix} \cos\theta & 0& -\sin\theta \cr 0 & 1 & 0\cr \sin\theta & 0& \cos\theta\cr \end{pmatrix}\!\!\begin{pmatrix}{x}\cr{y}\cr z\end{pmatrix}}\tag{1.10}\label{eq:1.10} \] \[ \hbox{rotazione attorno a }x\qquad \bbox[border:1px solid red,15px,#ffffcc]{ \begin{pmatrix}{x}' \cr {y}'\cr z'\end{pmatrix}=\begin{pmatrix} 1 & 0 & 0\cr 0& \cos\theta & \sin\theta \cr 0& -\sin\theta & \cos\theta\cr \end{pmatrix}\!\!\begin{pmatrix}{x}\cr{y}\cr z\end{pmatrix}\!.}\tag{1.11}\label{eq:1.11} \]Nota 1.1. Onde evitare interpretazioni errate, nell'ambito delle rotazioni è opportuno chiarire il significato e le convenzioni che ne sono alla base (Wolfram MathWorld).
Quanto sopra riguarda la rotazione di un sistema cartesiano tridimensionale ortogonale in un nuovo sistema cartesiano ortogonale mentre il vettore coinvolto (che spesso collega due punti nello spazio euclideo) rimane immutato. Diversamente, si può considerare la rotazione di un vettore in un secondo vettore mantenendo comunque il sistema cartesiano inalterato. In quest'ultimo caso la matrice di rotazione di angolo \(\theta\) attorno a \(z\) sarebbe
\[ \hbox{rotazione attorno a }z\qquad \begin{pmatrix}{x}' \cr {y}'\cr z'\end{pmatrix}= \begin{pmatrix} \cos\theta & -\sin\theta& 0 \cr \sin\theta & \cos\theta& 0\cr 0 & 0 & 1\cr \end{pmatrix}\!\!\begin{pmatrix}{x}\cr{y}\cr z\end{pmatrix}\tag{1.12}\label{eq:1.12} \]mentre quella di rotazione attorno a \(y\) e \(x\) diventerebbero
\[ \hbox{rotazione attorno a }y\qquad \begin{pmatrix}{x}' \cr {y}'\cr z'\end{pmatrix}=\begin{pmatrix} \cos\theta & 0& \sin\theta \cr 0 & 1 & 0\cr -\sin\theta & 0& \cos\theta\cr \end{pmatrix}\!\!\begin{pmatrix}{x}\cr{y}\cr z\end{pmatrix}\tag{1.13}\label{eq:1.13} \] \[ \hbox{rotazione attorno a }x\qquad \begin{pmatrix}{x}' \cr {y}'\cr z'\end{pmatrix}=\begin{pmatrix} 1 & 0 & 0\cr 0& \cos\theta & -\sin\theta \cr 0& \sin\theta & \cos\theta\cr \end{pmatrix}\!\!\begin{pmatrix}{x}\cr{y}\cr z\end{pmatrix}\tag{1.14}\label{eq:1.14} \]e la terna \((x',y',z')\) rappresenterebbe le componenti del vettore ruotato nel medesimo sistema cartesiano.
I sistemi cartesiani trattati nella sezione precedente non rappresentano l'unico modo per descrivere vettori nello spazio euclideo ma, a seconda delle simmetrie intrinseche al problema che si intende affrontare, si dimostrano utili altri sistemi di coordinate. Dal punto di vista matematico nei problemi a simmetria sferica si definisce un sistema di coordinate sferiche polari nel quale un vettore \({\bf OP}\) è individuato, nella convenzione che qui seguiamo, da tre parametri:

Queste coordinate assumono valori negli intervalli
\[ r \ge 0,\qquad 0 \le \theta \le 180^\circ,\qquad 0 \le \phi \lt 360^\circ,\tag{1.15}\label{eq:1.15} \]che, simbolicamente, indichiamo con
\[ r\in[0,+\infty[,\quad \theta\in[0,180^\circ],\quad \phi\in[0,360^\circ[ \]e, sulla base della figura 1.6, le coordinate cartesiane in termini delle coordinate sferiche risultano
\[ \cases{\eqalign{x &= r\sin\theta\cos\phi\cr y &= r\sin\theta\sin\phi\cr z &= r\cos\theta\cr}}\tag{1.16}\label{eq:1.16} \]mentre le componenti del vettore \({\bf OP}\) si possono esprimere come
\[ {\bf OP} = x\, {\bf i} + y\, {\bf j} + z\, {\bf k} = (r\sin\theta\cos\phi)\, {\bf i} + (r\sin\theta\sin\phi)\, {\bf j} + (r\cos\theta)\, {\bf k}.\tag{1.17}\label{eq:1.17} \]Viceversa, la terna \((r,\theta,\phi)\) è correlata alla \((x,y,z)\) dalle
\[ \cases{\eqalign{r &= \sqrt{x^2 + y^2 + z^2}\cr \theta &= \arccos\!\left({z\over r}\right)\cr \phi &= \arctan\!\left({y\over x}\right)\!.\cr}}\tag{1.18}\label{eq:1.18} \]L'applicazione più familiare e nota delle coordinate sferiche consiste nell'individuare un punto sulla superficie terrestre tramite la latitudine e la longitudine. Poiché l'asse di rotazione della Terra attraversa la sua superficie al polo Nord e al polo Sud, mentre il cerchio massimo perpendicolare ad esso e passante per il centro della Terra forma il piano dell'equatore, in questo caso la coordinata radiale \(r=r_T\) coincide con il raggio della Terra (supposta sferica) e la latitudine \(\phi\) del luogo è il complemento dell'angolo polare \(\theta\) nelle \eqref{eq:1.16}, cioè \(\theta = 90^\circ - \phi\). Questa è quindi la distanza angolare di un punto \(P\) dall'equatore, misurata lungo l'arco che collega i due poli positivamente verso Nord e negativamente verso Sud, arco che è detto meridiano (fig. 1.7).

Definito come meridiano fondamentale il semicerchio massimo per i poli passante per l'osservatorio astronomico di Greenwich, l'angolo tra il meridiano passante per il punto \(P\), con \(P\) non coincidente con i poli, e il meridiano di Greenwich, determina la longitudine \(\lambda\) e sostituisce nelle \eqref{eq:1.16} l'angolo azimutale \(\phi\). La longitudine assume i valori \([0^\circ,180^\circ]\) se ci si sposta verso Est dal meridiano fondamentale (verso antiorario o diretto), \(]-180^\circ,0^\circ]\) se verso Ovest (verso orario o retrogrado).
Con tali convenzioni e in base alle formule \eqref{eq:1.16} la posizione di un luogo terrestre in coordinate cartesiane è individuata da
\[ \cases{\eqalign{x &= r_T\sin\bigl(90^\circ-\phi\bigr)\cos\lambda=r_T\cos\phi\cos\lambda\cr y &= r_T\sin\bigl(90^\circ-\phi\bigr)\sin\lambda=r_T\cos\phi\sin\lambda\cr z &= r_T\cos\bigl(90^\circ-\phi\bigr)=r_T\sin\phi.\cr}} \qquad\hbox{con}\qquad -90^\circ \le \phi \le 90^\circ,\quad -180^\circ \lt \lambda \le 180^\circ \tag{1.19}\label{eq:1.19} \]Luoghi a latitudine positiva si trovano nell'emisfero boreale, quelli a latitudine negativa in quello australe e punti sulla superficie terrestre aventi la medesima latitudine appartengono ad un medesimo cerchio minore parallelo all'equatore terrestre detto parallelo. Luoghi invece di egual longitudine si trovano sul medesimo semicerchio meridiano.
Accanto a questo sistema di coordinate geografiche che abbreviamo con la sigla GEO per ricordare le coordinate GEOgrafiche, in astronomia si usano altri sistemi di coordinate cartesiane e sferiche per poter individuare le posizioni di oggetti celesti. È esperienza comune l'osservazione delle stelle durante una notte serena e avere l'impressione che queste appartengano ad una superficie sferica, la sfera celeste, caratterizzata da un moto di rotazione attorno ad un punto fisso della volta, il polo nord celeste e della quale noi occupiamo il centro. Da queste semplici osservazioni ne derivano, come vedremo nelle sezioni successive di questo capitolo, altri sistemi di coordinate celesti più generali tra i quali, e nella sezione successiva partiamo da questo, pure quello associato alla posizione locale dell'osservatore.
La direzione del filo a piombo fornisce all'osservatore una precisa direzione, la verticale locale, e assieme al piano a questa perpendicolare che determina l'orizzonte locale, permette di introdurre un sistema cartesiano con l'osservatore nell'origine \(O\) la cui posizione sulla superficie terrestre è invece individuata dalle sue coordinate geografiche, latitudine \(\phi\) e longitudine \(\lambda\). Il piano \(xy\) avente la terza coordinata nulla, \(z=0\), interseca la sfera celeste nell'orizzonte astronomico (o, semplicemente orizzonte) mentre l'asse \(z\) coincide con la verticale ed è orientato verso lo Zenit (Z), punto quest'ultimo di intersezione della verticale con la sfera celeste (fig. 1.8). Supposto l'asse \(x\) orientato verso Sud (S) e l'asse \(y\) verso Ovest (W) per cui la terna che ne deriva è sinistrorsa in quanto il prodotto vettoriale dà \({\bf i}\times{\bf j}=-{\bf k}\), è possibile far corrispondere a tale sistema cartesiano un sistema di coordinate sferiche polari con la medesima origine \(O\), asse polare verticale \(z\) coincidente con la verticale e piano \(xy\) coincidente con l'orizzonte astronomico (fig. 1.8 sinistra).

In questo sistema detto altazimutale e che indichiamo brevemente in questo lavoro come TAA, Topocentrico Altezza Azimuth, le coordinate cartesiane \((x,y,z)\) sono correlate alle coordinate sferiche ancora dalle \eqref{eq:1.16}. Comunque, poiché la coordinata radiale \(r\) indica la distanza dall'osservatore dell'oggetto celeste osservato, e poiché si suppone che questa distanza sia molto grande e costante tale da poter immaginare il corpo come solidale alla sfera celeste, risulta possibile individuare la sua posizione con solo due angoli che in questo sistema vengono indicati come altezza \(a\) e azimut \(A\).
L'altezza \(a\) misura la distanza angolare di un oggetto celeste dall'orizzonte con valori positivi \(0^\circ\leq a\leq 90^\circ\) verso lo Zenit e negativi verso il Nadir, punto della sfera celeste opposto allo Zenit e appartenente alla verticale locale.
La seconda coordinata, l'azimut \(A\), misura invece la distanza angolare di un oggetto celeste dal meridiano locale, distanza misurata lungo l'orizzonte astronomico. Questo meridiano passa per lo Zenit e il polo celeste boreale o polo Nord celeste (pNc), polo che dallo Zenit dista un angolo pari alla colatitudine \(90^\circ-\phi\) e che quindi possiede nel sistema TAA un'altezza \(a_{pNc}=\phi\). A partire dall'intersezione di questo meridiano con l'orizzonte, il Sud, e procedendo positivamente verso Ovest, l'azimut assume i valori nell'intervallo \(0^\circ\le A\lt 360^\circ\) (fig. 1.8 sinistra). In tal modo i punti cardinali caratterizzati dalle coordinate cartesiane, Sud\((1,0,0)\), Ovest\((0,1,0)\), Nord\((-1,0,0)\) ed Est\((0,-1,0)\), (fig. 1.8 sinistra), hanno nel sistema polare rispettivamente azimut pari a \(0^\circ\), \(90^\circ\), \(180^\circ\) e \(270^\circ\) e altezza nulla mentre lo Zenit \((0,0,1)\) ha un azimut non definito e altezza \(90^\circ\).
Comunque alla convenzione sull'azimut appena esposta, se ne affianca una seconda dove l'azimut viene contato invece a partire dal Nord (N) e positivamente verso Est (E) cosicché l'azimut dell'Est, ora individuato dalla terna \((0,1,0)\), è uguale a \(90^\circ\) (fig. 1.8 destra).
Osservato che in entrambi i casi le terne dei versori cartesiani sono sinistrorse (fig. 1.8), le relazioni con le coordinate sferiche riportate in \eqref{eq:1.16} richiedono le sostituzioni \(r=1\), \(\phi=A\) e \(\theta=90^\circ-a\) cosicché otteniamo
\[ \bbox[border:1px solid red,15px,#ffffcc]{ \cases{\eqalign{x &= \sin(90^\circ-a)\cos A=\cos a\cos A\cr y &= \sin(90^\circ-a)\sin A=\cos a\sin A\cr z &= \cos(90^\circ-a)=\sin a.\cr}}\tag{1.20}\label{eq:1.20} \qquad\hbox{con}\qquad -90^\circ \le a \le 90^\circ,\quad 0^\circ \le A \lt 360^\circ. } \]Se questo sistema si dimostra intuitivo ed immediato, pur tuttavia è condizionato dalla dipendenza dal luogo di osservazione: uno stesso oggetto celeste sarà caratterizzato da coordinate diverse se diversi sono gli osservatori. Per questo motivo le coordinate di uno stesso oggetto appaiono e sono dette locali e, per il moto di rotazione della Terra, pure dipendenti dal tempo. Pertanto se intendiamo comunicare a osservatori distinti la posizione di un oggetto celeste, in aggiunta alle coordinate locali di azimut e altezza, sarà necessario specificare pure il luogo tramite longitudine e latitudine e, non ultimo, l'istante dell'osservazione.
D'altra parte, poiché il nostro obiettivo è di comprendere le principali cause e relative argomentazioni che spiegano le posizioni assunte dal Sole nel corso del tempo così come vengono rilevate da un comune osservatore, sarà questo il sistema cui, alla fine, dovremo riferirci per descrivere il moto apparente del Sole.
L'asse di rotazione della Terra interseca la sfera celeste in due punti opposti detti polo Nord celeste (pNc) e polo Sud celeste (pSc). Poiché la direzione di quest'asse rimane sostanzialmente invariata nel tempo (trascuriamo i moti di precessione e nutazione) essa costituisce la base per un secondo sistema di coordinate cartesiane celesti del quale costituisce l'asse \(z\). Il piano equatoriale terrestre proiettato sulla sfera celeste definisce l'equatore celeste e assunto come origine \(O\) il centro della Terra (il sistema per tale motivo si dice geocentrico), vi sono compresi in esso gli assi \(x\) e \(y\). Il primo è orientato verso il cosiddetto punto \(\gamma\) o punto vernale che individua nella sfera celeste, il punto di intersezione del piano dell'orbita apparente del Sole, l'eclittica, con l'equatore celeste e che, come vedremo, è collegato all'equinozio di primavera e al punto cardinale dell'Est, intersezione pure dell'equatore celeste con il piano dell'orizzonte astronomico (fig. 1.10). Il secondo asse è orientato in modo da formare con gli altri due una terna destrorsa.

Su tali basi è possibile definire il sistema equatoriale (GEQ, Geocentrico EQuatoriale) come un sistema sferico polare e associarlo alla terna rettangolare \((x,y,z)\) indicando le sue due coordinate angolari come ascensione retta \(\alpha\) e declinazione \(\delta\).
La prima misura la distanza angolare dell'oggetto celeste dal punto \(\gamma\) e procede lungo l'equatore celeste in verso antiorario con \(0^\circ\leq \alpha< 360^\circ\): i semicerchi perpendicolari all'equatore e caratterizzati dalla stessa ascensione retta costituiscono, in questo sistema, i meridiani celesti (e il meridiano che passa per l'asse \(y\) possiede \(\alpha=90^\circ\)).
La seconda coordinata esprime invece la distanza angolare dall'equatore celeste lungo un meridiano e assume i valori nell'intervallo \(-90^\circ\leq \delta\leq 90^\circ\) dove i valori positivi indicano astri appartenenti alla semisfera contenente il polo Nord celeste.
Analogamente a quanto fatto precedentemente, riprese le \eqref{eq:1.16} e sostituendo \(r=1\), \(\phi=\alpha\) e \(\theta=90^\circ-\delta\) derivano le relazioni tra il sistema cartesiano e quello sferico.
\[ \bbox[border:1px solid red,15px,#ffffcc]{ \cases{\eqalign{x &= \sin(90^\circ-\delta)\cos\alpha=\cos\delta\cos\alpha\cr y &= \sin(90^\circ-\delta)\sin\alpha=\cos\delta \sin\alpha\cr z &= \cos(90^\circ-\delta)=\sin\delta\cr}} \qquad\hbox{con}\qquad -90^\circ \le \delta \le 90^\circ,\quad 0^\circ \le \alpha \lt 360^\circ. } \tag{1.21}\label{eq:1.21}\]In questo sistema, solidale alla sfera celeste, e a prescindere dai moti propri delle stelle e dell'asse terrestre la coppia di coordinate \((\alpha,\delta)\) permette di individuare un oggetto celeste senza alcuna dipendenza dal tempo e, per oggetti molto distanti, indipendentemente dal luogo di osservazione (nota 1.2): per questi motivi, queste coordinate sono utilizzate nella redazione dei cataloghi di oggetti stellari e loro mappe.
Tuttavia, per individuare un astro è necessario conoscere la data e l'ora dell'osservazione in quanto pur essendo questo solidale alla sfera celeste e quindi caratterizzato dalla coppia \((\alpha,\delta)\) indipendente dal tempo, le sue coordinate locali dipendono ancora dal moto apparente della sfera celeste. Poiché la Terra completa una rotazione di \(360^\circ\) attorno al proprio asse in \(23\,\hbox{h}\,\,56'\,4.09''\), valore che definisce la durata del giorno siderale o sidereo, risulta conveniente collegare il sistema equatoriale allo scorrere del tempo introducendo una nuova coordinata locale, l'angolo orario.

A tal fine riprendiamo il sistema di coordinate locali descritto nella precedente sezione 1.4 riportando nella figura 1.10 le sue direzioni principali Nord-Sud (N-S), Est-Ovest (E-W), lo Zenit-Nadir (Z-Na) e, in blu, il cerchio dell'orizzonte (N-E-S-W). L'angolo che la direzione dello Zenit forma con l'equatore celeste è evidentemente pari alla latitudine \(\phi\) dell'osservatore. Osserviamo come il cerchio massimo per i poli celesti, lo Zenit, il Nord e il Sud geografici (N-pNc-Z-S-pSc-Na, in rosso nella figura 1.10) non solo contiene due meridiani, il superiore (pNc-Z-S-pSc) e l'inferiore (pNc-N-pSc) ma è pure un cerchio massimo del sistema locale perché passa per lo Zenit e il Nadir. Per la sua importanza viene indicato come meridiano (celeste) superiore o anche meridiano locale dell'osservatore. La direzione ortogonale a questo cerchio è la linea Est-Ovest.
Consideriamo ora due meridiani celesti, il meridiano passante per l'oggetto celeste \(P\) e il meridiano superiore. Indichiamo con \(R\) il punto di intersezione di quest'ultimo con l'equatore celeste punto che viene detto mezzocielo (figura 1.10). Se pensiamo la sfera celeste in rotazione (apparente) da Est verso Ovest, sia \(H\) l'angolo dipendente dal tempo che, lungo l'equatore, il meridiano celeste per \(P\) forma con il meridiano superiore (\(H={}\)R-Z-pNc-P), meridiano che diversamente dal primo rimane invece fisso per l'osservatore mentre la sfera celeste ruota.
\(H\) è chiamato l'angolo orario locale dell'astro \(P\) e, a partire dal punto \(R\) dove è nullo, \(H=0^\circ\), assume valori crescenti verso Ovest nell'intervallo \([0^\circ,360°[\). Definita la declinazione \(\delta\) quale distanza angolare di \(P\) lungo un meridiano dall'equatore celeste e associati gli assi del sistema cartesiano ai versori \(\mathbf{i}\) diretto al mezzocielo, \(\mathbf{j}\) verso Ovest e \(\mathbf{k}\) verso il polo Nord celeste (pertanto la terna è sinistrorsa), questo sistema detto equatoriale orario (GOE, Geocentrico Orario Equatoriale) si completa, come nelle precedenti, con la terna di equazioni polari
\[ \bbox[border:1px solid red,15px,#ffffcc]{ \cases{\eqalign{x &= \cos\delta\cos H\cr y &= \cos \delta\sin H\cr z &= \sin\delta\cr}\tag{1.22}\label{eq:1.22} \qquad\hbox{con}\qquad -90^\circ \le \delta \le 90^\circ,\quad 0^\circ \le H \lt 360^\circ.} }\]Poiché il punto vernale \(\gamma\) è solidale alla sfera celeste, esso partecipa allo stesso modo di \(P\) al moto di rotazione. Definito pertanto come tempo siderale il suo angolo orario cioè l'angolo \(t_s\) tra il meridiano superiore e quello per \(\gamma\) (fig. 1.11), entrambi gli angoli \(H\) e \(t_s\) variano nello stesso modo proporzionalmente al tempo mentre la loro distanza angolare lungo l'equatore cioè l'ascensione retta (che li separa), è una costante in quanto, come detto, entrambi i punti sono solidali alla sfera celeste. Poiché il verso positivo scelto per l'ascensione retta di \(P\) è antiorario mentre l'angolo orario \(H\) è positivo verso Ovest, ne discende la semplice ma fondamentale relazione tra \(\alpha\), \(t_s\) e \(H\): l'ascensione retta dell'oggetto celeste \(P\) è la differenza dei due angoli orari \(t_s\) e \(H\) (fig. 1.11) ossia

Da questa relazione discende che quando un astro transita al meridiano superiore e quindi il suo angolo orario è nullo \(H=0\), la sua ascensione retta coincide con il tempo siderale \(t_s=\alpha\). Poiché in questo istante l'astro raggiunge la massima altezza sull'orizzonte, altezza che dipende dalla latitudine \(\phi\) dell'osservatore e dalla declinazione \(\delta\) dell'astro, si giustifica il termine che individua tale istante come la culminazione dell'astro. Inoltre ripetendosi periodicamente dopo ogni giorno siderale, nel caso sia nota l'ascensione retta \(\alpha\) di un astro la \eqref{eq:1.23} permette di conoscere il tempo siderale \(t_s\) così da poter sincronizzare un orologio siderale. Viceversa, se si conosce il tempo siderale \(t_s\) in un dato istante, la stessa relazione permette di calcolare l'angolo orario \(H\) di un astro con ascensione retta \(\alpha\) nota.

Nella figura 1.12 riportiamo, da due differenti punti di vista, gli stessi elementi della figura 1.11 ponendo in evidenza in ciascuna l'orizzonte o il meridiano superiore. Il meridiano superiore, N-pNc-Z-R-S-pSc-Na appare in rosso al bordo della sfera celeste (sinistra) mentre in blu tracciamo l'orizzonte locale N-E-S-W. Nella figura a destra intendiamo mettere in evidenza il meridiano superiore. In entrambe, il punto \(R\) appare compreso tra lo Zenit e il Sud giustificando, per le nostre latitudini, il termine di "mezzocielo".
Poiché entrambi gli angoli orari coinvolti nella \eqref{eq:1.23} dipendono dal tempo secondo la legge del moto circolare uniforme, conviene esprimere le loro ampiezze in termini di unità temporali secondo la convenzione che associa \(24\,\hbox{h}\) ad una rotazione completa di \(360^\circ\): in tal modo i valori assunti da \(\alpha,\,t_s,\,h\) appartengono tutti all'intervallo \([0,24\hbox{h}[\). Se quindi l'intervallo di tempo che trascorre tra due culminazioni di una stella definisce il giorno siderale cui corrisponde una rotazione di \(360^\circ\), ne derivano le seguenti relazioni tra ore, minuti e secondi e le corrispondenti unità angolari:
\[\bbox[border:1px solid red,15px,#ffffcc]{ 360^\circ = 24\,\hbox{h}\quad\Longrightarrow\quad 15^\circ = 1\,\hbox{h}\quad\Longrightarrow\quad 1^\circ = 4\,\hbox{min}\quad\Longrightarrow\quad 1' = 4\,\hbox{s}.}\tag{1.24}\label{eq:1.24} \]
Nota 1.2. Nei due sistemi di coordinate equatoriali si è posto l'osservatore \(O\) nel centro della Terra e per questo i sistemi si dicono geocentrici. D'altra parte l'osservatore è situato sulla superficie terrestre per cui in realtà il sistema diverrebbe topocentrico con la conseguenza che le misure angolari di oggetti celesti saranno diverse nei due sistemi per effetto della parallasse.
Con riferimento alla figura 1.13 e nei limiti di un esempio, sia \(a_2\) la distanza zenitale rilevata per un oggetto celeste \(P\) dal punto \(Q\) dov'è posizionato l'osservatore sulla superficie terrestre e \(a_1\) la distanza zenitale dello stesso oggetto \(P\) dal centro \(O\) della Terra (e quindi \(OQ\) rappresenta il raggio terrestre). Evidentemente i due angoli sono diversi perché diversi sono i due punti di vista e la loro differenza definisce, appunto, l'angolo di parallasse \(\psi=\angle(OPQ)=a_2-a_1\). Quest'angolo è tanto più grande quanto più l'oggetto è vicino alla Terra e tanto più piccolo quanto più è lontano. Per la Luna la parallasse può raggiungere valori di circa \(1^\circ\) mentre per il Sole è di circa \(8.8''\). Per gli altri pianeti del sistema solare la parallasse è ancora più piccola mentre per le stelle è trascurabile. Per questi ultimi astri si può quindi assumere con ottima approssimazione \(\psi\approx 0^\circ\) e in tal modo si giustifica la scelta che qui seguiamo, nel porre l'origine di un sistema topocentrico coincidente con quella dei due sistemi equatoriali geocentrici e in tal modo approssimando un sistema topocentrico ad uno geocentrico.

L'orbita della Terra attorno al Sole è una ellisse per cui, essendo questa una curva piana, il suo moto di rivoluzione avviene in un piano detto piano dell'eclittica. Di conseguenza il Sole, nel suo moto apparente annuale lungo la sfera celeste, segue una traiettoria circolare piana che, nella sfera celeste costituisce un cerchio massimo detto, appunto, eclittica. L'eclittica interseca l'equatore celeste in due punti diametralmente opposti: il primo individua la posizione del Sole nel momento dell'equinozio di primavera o nodo ascendente e costituisce il punto \(\gamma\) nella costellazione dell'Ariete già scelto come origine dell'ascensione retta nel sistema equatoriale GEQ, mentre il secondo rappresenta l'equinozio d'autunno \(\gamma'\) o nodo discendente. La linea che li connette è detta linea degli equinozi e appartiene sia al piano dell'eclittica che al piano dell'equatore celeste (fig. 1.14). Il piano dell'eclittica forma inoltre un angolo con l'equatore celeste a causa dell'inclinazione dell'asse terrestre rispetto al piano dell'eclittica. Quest'angolo definisce l'obliquità dell'eclittica, è indicato con la lettera \(\epsilon\) (epsilon), e la sua ampiezza è \(\epsilon\approx 23.44^\circ\).

Il piano dell'eclittica permette di definire una direzione ad esso perpendicolare cui associamo l'asse \(z\) di un sistema cartesiano avente l'origine nel centro della Terra \(O\) e orientato verso il polo boreale dell'eclittica (pNe, fig. 1.15). L'asse \(x\) coincide con la linea degli equinozi, \(\gamma\)-\(\gamma'\) ed il suo verso positivo è rivolto all'equinozio di primavera. Il cerchio massimo passante per il polo Nord eclittico, il polo Nord celeste e il polo Sud eclittico (pNe-pNc-pSe) è un cerchio massimo anche nel sistema equatoriale, è perpendicolare al piano degli equinozi (pNe-\(\gamma\)-pSe-\(\gamma'\)) e interseca l'eclittica nei punti \(S_e\) e \(S_i\) che individuano, rispettivamente, il solstizio d'estate e d'inverno. La terna di versori cartesiani è quindi destrorsa se si orienta l'asse \(y\) verso il solstizio d'estate (fig. 1.15).

Le coordinate sferiche di un oggetto celeste in questo sistema geocentrico che indichiamo con la sigla GEC ( Geocentrico EClittico) sono la longitudine celeste \(\lambda\) che esprime la distanza angolare dell'oggetto celeste dal punto \(\gamma\) con \(0^\circ\leq \lambda\lt 360^\circ\) procedendo in verso diretto (antiorario) mentre la seconda coordinata è la latitudine eclittica \(\beta\) che rappresenta la distanza angolare dell'oggetto celeste dall'eclittica con \(0^\circ\leq \beta\leq 90^\circ\) se l'oggetto si trova a Nord dell'eclittica, e negativamente se a Sud (fig. 1.15).
Le equazioni che legano il sistema cartesiano a quello polare sono, al solito
\[ \bbox[border:1px solid red,15px,#ffffcc]{ \cases{\eqalign{x &= \sin(90^\circ-\beta)\cos\lambda=\cos\beta\cos\lambda\cr y &= \sin(90^\circ-\beta)\sin\lambda=\cos\beta\sin\lambda\cr z &= \cos(90^\circ-\beta)=\sin\beta\cr}} \qquad\hbox{con}\qquad -90^\circ \le \beta \le 90^\circ,\quad 0^\circ \le \lambda \lt 360^\circ. }\tag{1.25}\label{eq:1.25} \]Il sistema di coordinate eclittiche è quindi un altro sistema celeste e considerando che l'asse \(x\) del sistema eclittico e di quello equatoriale è il medesimo, si può, come vedremo nel capitolo 2, passare da un sistema all'altro tramite una rotazione attorno a tale asse di un angolo pari all'obliquità.
Le stagioni sono una conseguenza dell'obliquità ossia dell'inclinazione dell'asse terrestre rispetto all'eclittica cosicché il Sole, nel suo moto lungo l'eclittica, all'inizio della primavera attraversa l'equatore celeste nel punto \(\gamma\) passando dall'emisfero celeste australe a quello boreale mentre il viceversa avviene all'equinozio d'autunno \(\gamma'\). Il solstizio estivo, \(S_e\) e quello invernale \(S_i\) individuano invece i punti in corrispondenza dei quali è massima o minima la distanza dall'equatore celeste per cui la declinazione assume il valore massimo \(\delta_{max}=\epsilon\) al solstizio d'estate, e minimo al solstizio d'inverno \(\delta_{min}=-\epsilon\) (fig. 1.16).

Tutti i pianeti orbitano attorno al Sole con piani orbitali prossimi o coincidenti con quello dell'eclittica. È quindi naturale introdurre anche un sistema di coordinate eclittiche centrato sul Sole (EEC, Eliocentrico EClittico) dove le coordinate sferiche sono la longitudine celeste \(\lambda_S\) che esprime la distanza angolare dell'astro dal punto \(\gamma\) con \(0^\circ\leq \lambda_S< 360^\circ\) procedendo in verso diretto (antiorario) mentre la seconda coordinata è la latitudine eclittica \(\beta_S\). Poiché la terna di versori è la medesima del sistema geocentrico e varia solamente l'origine (capitolo 2) per cui EEC è una traslazione di GEC, le coordinate polari sono collegate alle cartesiane da relazioni simili alle \eqref{eq:1.25}
\[ \bbox[border:1px solid red,15px,#ffffcc]{ \cases{\eqalign{x &= \cos\beta_S\cos\lambda_S\cr y &=\cos\beta_S\sin\lambda_S\cr z &= \sin\beta_S\cr}} \qquad\hbox{con}\qquad -90^\circ \le \beta_S \le 90^\circ,\quad 0^\circ \le \lambda_S \lt 360^\circ. }\tag{1.26}\label{eq:1.26} \]In conclusione di questo capitolo, riassumiamo nella tabella seguente le principali caratteristiche dei sistemi di coordinate celesti coinvolti in questo lavoro.
| Sistema di coordinate | Origine | Terna versori cartesiani | Abbreviazione | Descrizione |
|---|---|---|---|---|
| Coordinate geografiche terrestri | Centro della Terra | destrorsa | GEO | Latitudine \(\phi\) dall'equatore e longitudine \(\lambda\) dal meridiano di Greenwich di un luogo sulla superficie terrestre. |
| Coordinate locali altazimutali | Posizione dell'osservatore | sinistrorsa | TAA | Altezza \(a\) dall'orizzonte locale e angolo di azimut \(A\) del meridiano contato da Sud (o da Nord) lungo l'orizzonte dell'osservatore. |
| Coordinate equatoriali | Centro della Terra | destrorsa | GEQ | Ascensione retta dal punto \(\gamma\) (o punto vernale) in verso antiorario e distanza angolare, declinazione \(\delta\), di un astro dall'equatore celeste. |
| Coordinate orarie equatoriali | Centro della Terra | sinistrorsa | GOE | Angolo orario \(H\) dal meridiano superiore in verso orario dal Sud e distanza angolare, declinazione \(\delta\), di un astro dall'equatore celeste. |
| Coordinate eclittiche | Centro della Terra | destrorsa | GEC | Longitudine \(\lambda\) a partire dal punto \(\gamma\) (o punto vernale) in verso antiorario e latitudine eclittica \(\beta\) di un oggetto celeste rispetto al piano dell'eclittica. |
| Coordinate eclittiche | Centro del Sole | destrorsa | EEC | Longitudine \(\lambda_S\) a partire dal punto \(\gamma\) (o punto vernale) in verso antiorario e latitudine eclittica \(\beta_S\) di un oggetto celeste rispetto al piano dell'eclittica. |